Just as every automaker seems to be up to their knees developing the latest in automotive technology, Audi->ke14 has momentarily traded in its lab coat for a well-pressed suit to announce its latest technological masterpiece. The German automaker has introduced a new quattro all-wheel-drive system with ultra technology,->ke1701 aimed to make driving experiences more efficient without having to sacrifice the car’s performance and handling characteristics.
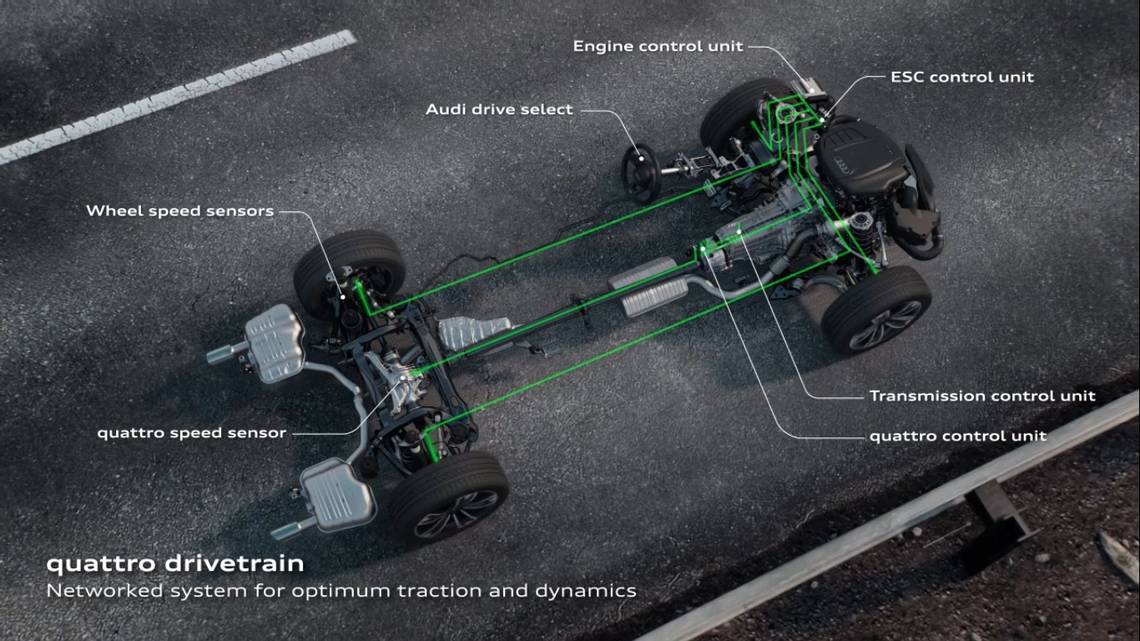
The German automaker accomplished this by installing a number of sensors throughout the drive system. Each of these sensors is responsible for monitoring a number of factors that determine the drive system in use at any point in the ride, be it front-wheel-drive or all-wheel drive. Road conditions, vehicle data, and driver behavior all play a part in this automated shifting of drive systems.
The system starts off in all-wheel-drive mode but when it detects that AWD isn’t particularly needed, the AWD system automatically deactivates and transitions into front-wheel-drive. The system then reverts back to all-wheel-drive when driving conditions call for it. According to Audi, that change can happen in a matter of milliseconds, enabling the car to quickly adapt to certain road conditions that forces a car to, for example, lose traction. More impressive is Audi’s claim that the system can analyse an assortment of data instantaneously before reverting back to AWD.
Essentially, this new quattro all-wheel-drive system provides the benefits of front-wheel-drive and its all-wheel counterpart. The company says that this new system can reduce fuel consumption by as much as 0.3 liters/100 kilometers compared to traditional drive systems.
Audi’s new A4 Allroad will get first dibs on this new quattro all-wheel-drive system with ultra technology, although it’s unclear if the company is going to offer this as a standard feature or as an added option. The A4 Allroad->ke1087 is expected to arrive in European markets later this summer with the US market not far behind at the tail end of 2016.
Continue reading for the full story.
Why it matters
There are so many things going on in the industry these days that it has become an impetus for a lot of these companies to come out with a new technology that nobody else has. That’s one of the advantages of the business these days. Everybody has to be on their respective ‘A’ games if they want to keep up with the rest.
Audi’s new drive system is a great example of what happens when a company is motivated to bring out the best in itself. The technology is interesting in that it effectively puts two drive systems into one car. Not only does it make these cars more versatile, but as Audi said, it also makes them more efficient. That’s become very important these days, especially for customers who have become more discerning with their requirements for a car.
The new drive system also has a number of other functions that are tied into each other. For instance, it has variable torque distribution, which allows the road conditions to determine the distribution of drive torque between the front and rear wheels. This feature is connected to the wheel-selective torque control, which provides continuous interaction between the drive system and the brakes. Depending on the direction a car is going, this system can send more drive torque to the wheels that need it the most.
Add them all together and you basically have an intelligent drive system that can make the necessary changes depending on what the car needs at any point in time, thus giving a driver the peace of mind to know that in any kind of road situation, this new derive system has his back.
2017 Audi A4 Allroad Quattro
Read our full review on the 2017 Audi A4 Allroad Quattro here.